教学资源库
🌟 项目概述
“教学资源库” 是专为高校教师与交通专业自动驾驶领域学生打造的特色栏目。在这里,高校教师能获取针对感知、预测、决策规划、控制、前沿五大问题示例模型的教学 PPT 等资料,辅助日常教学;交通、汽车、控制等专业学生可借此深入理解示例模型原理,强化专业知识。
OnSite教学资源库聚焦自动驾驶系统开发的”感知-预测-决策-控制-前沿”技术闭环,提供模块化教学资源
教学资源预览
第一讲
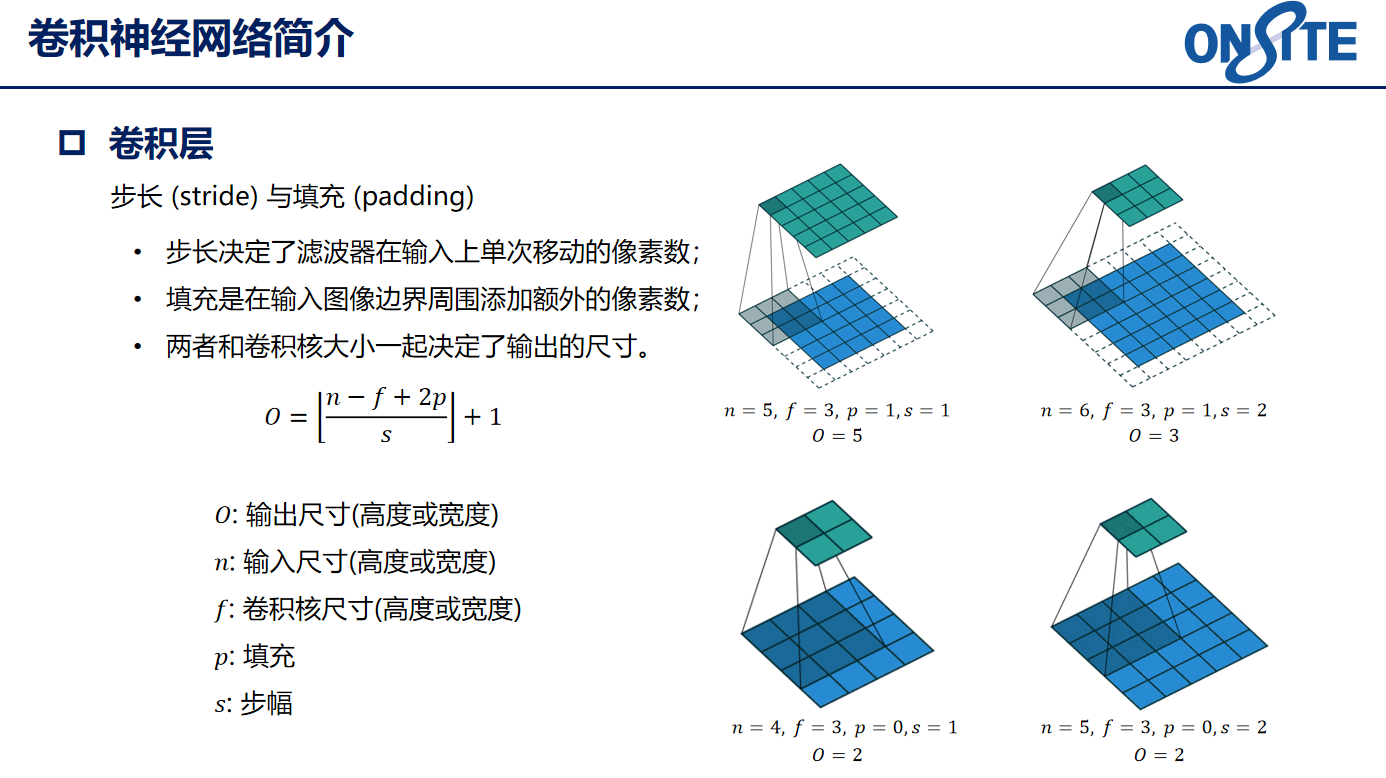
感知问题:感知基础
第二讲
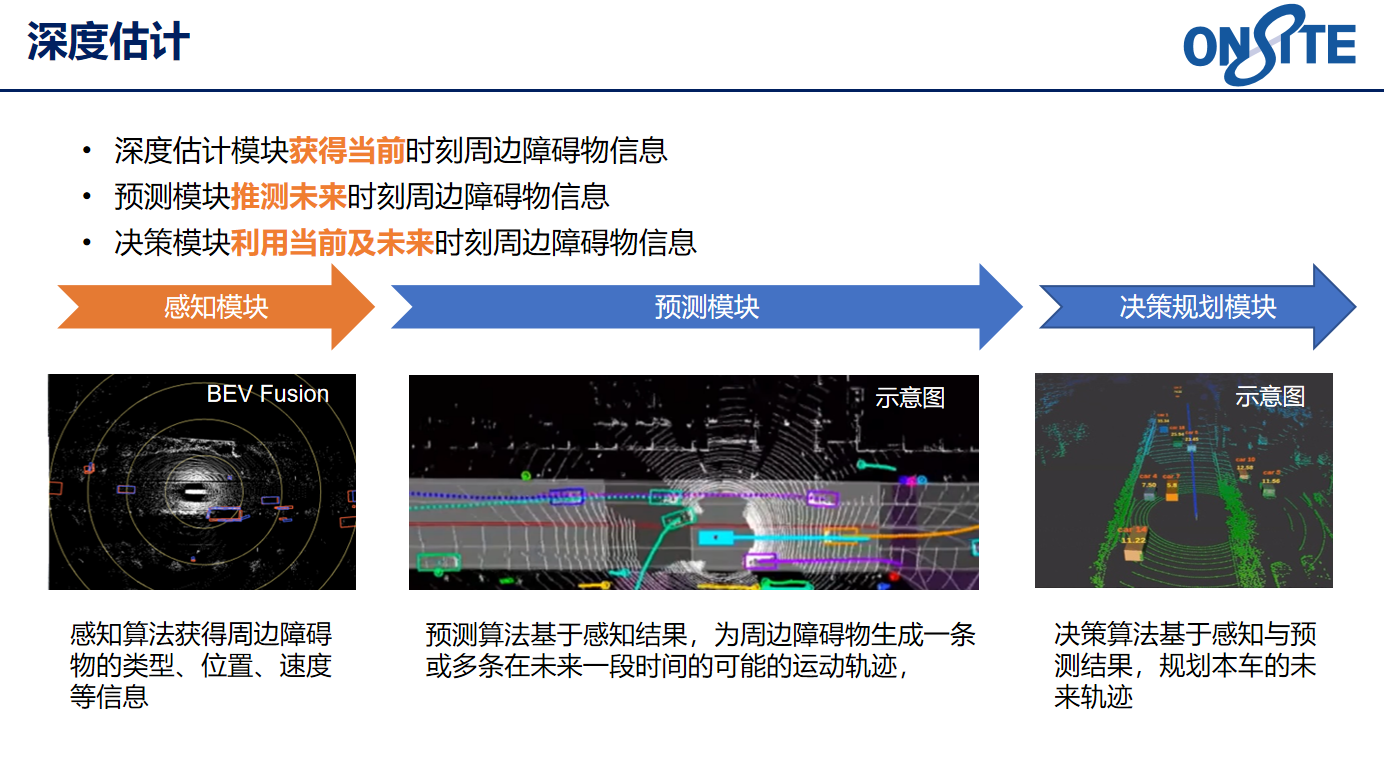
感知问题:深度估计
第三讲
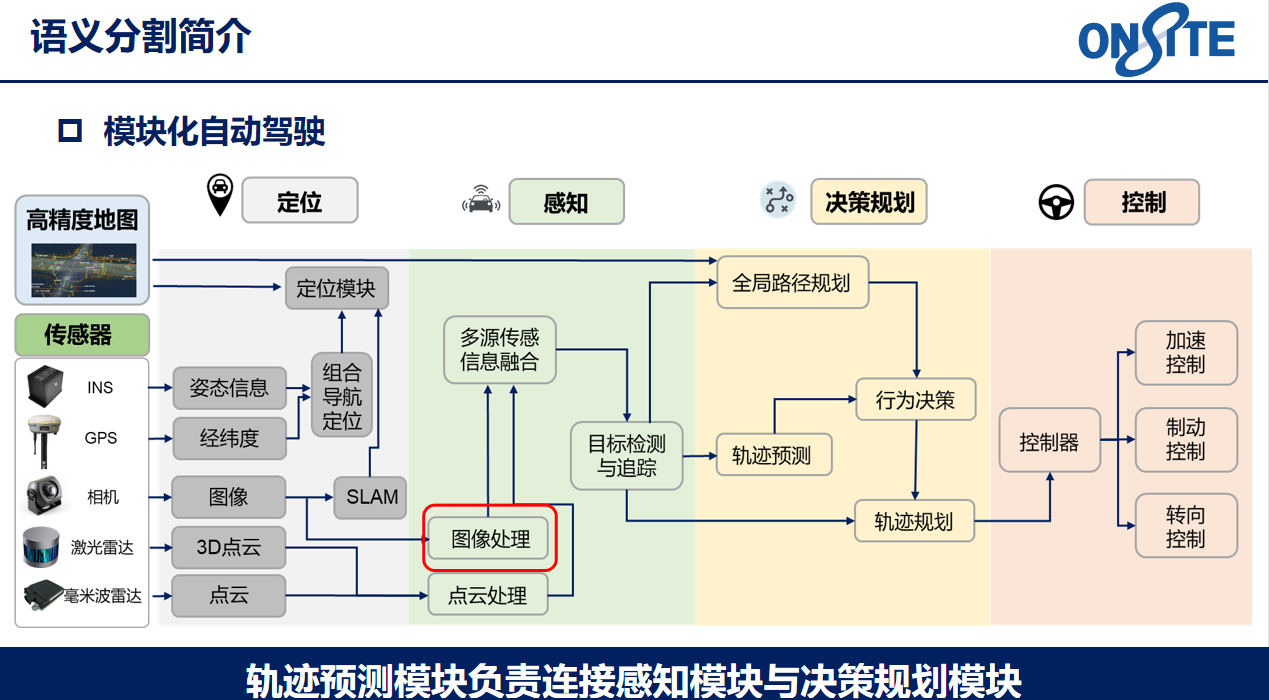
感知问题:语义分割
第四讲
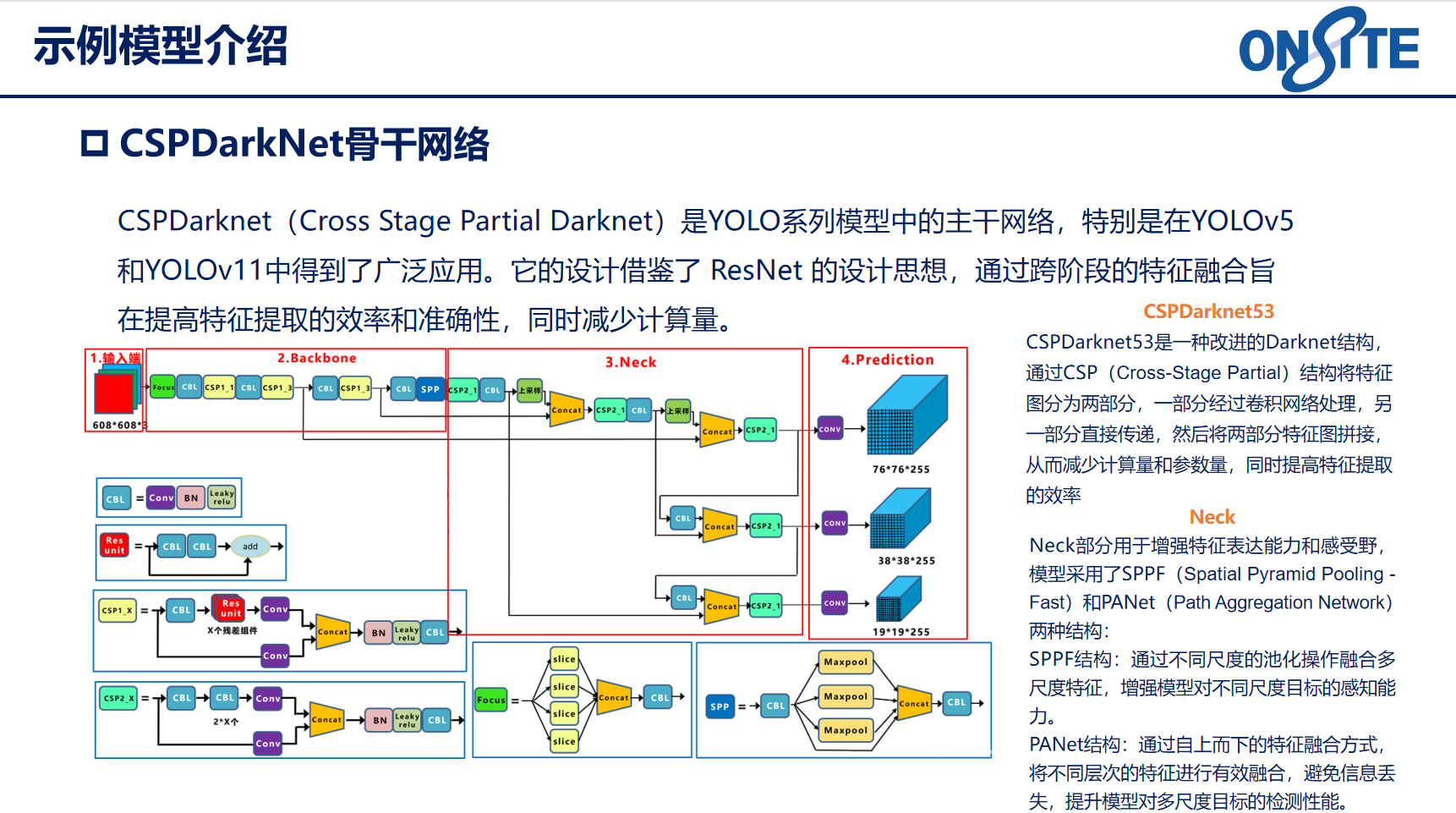
感知问题:2D目标检测
第五讲
预测问题:单车单模态
第六讲
预测问题:多车单模态
第七讲
预测问题:VRU轨迹预测

第八讲
决策规划问题:单车行为决策
第九讲
决策规划问题:协同决策
第十讲
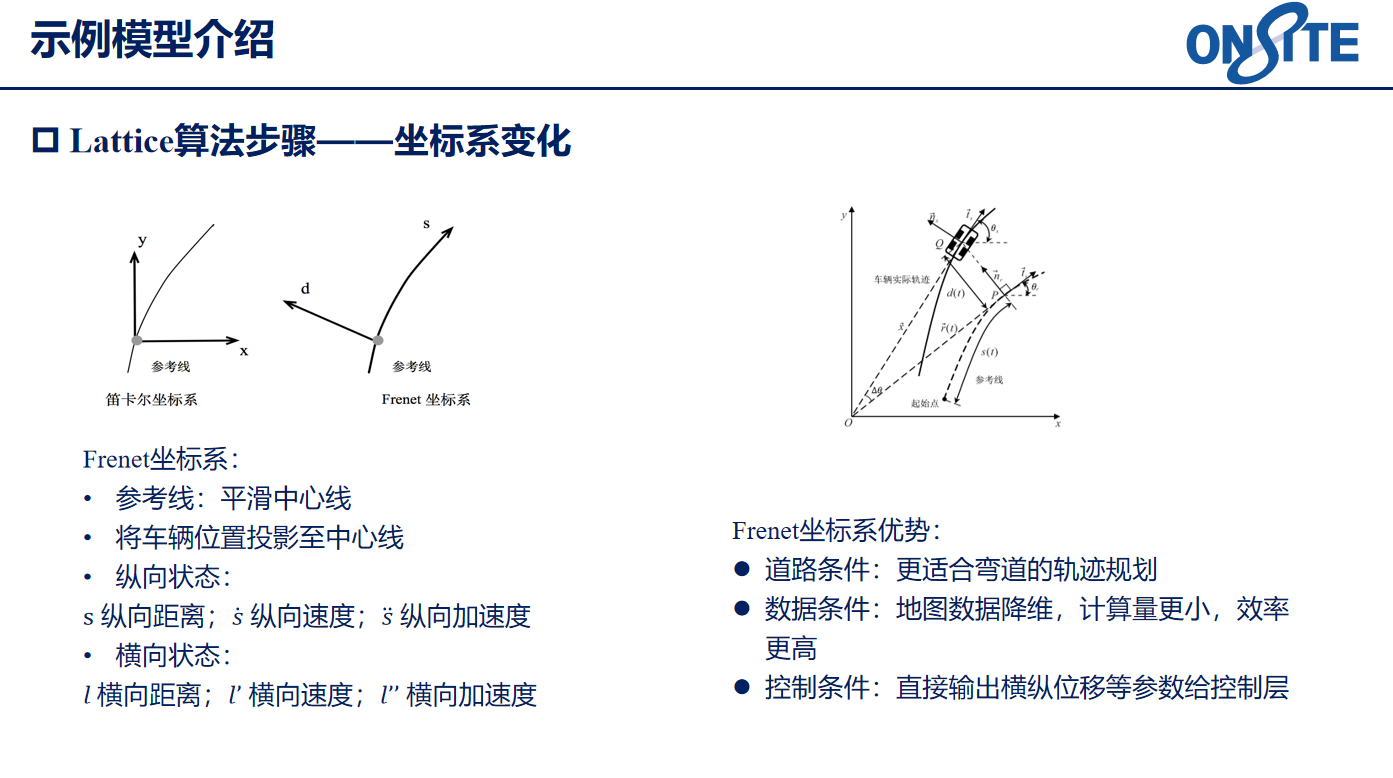
决策规划问题:轨迹规划
第十一讲
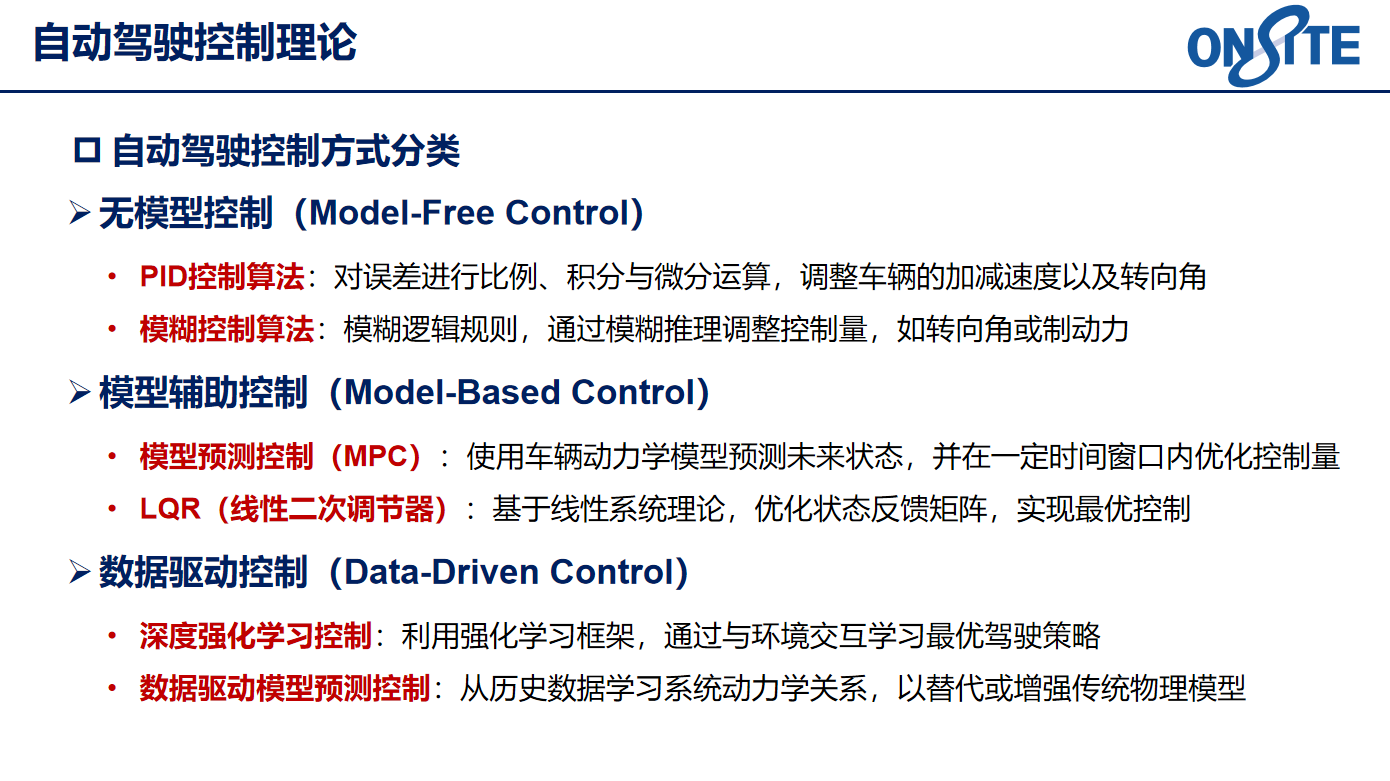
控制问题:自动驾驶运动控制概述
第十二讲
控制问题:纵向控制典型方法与案例
第十三讲
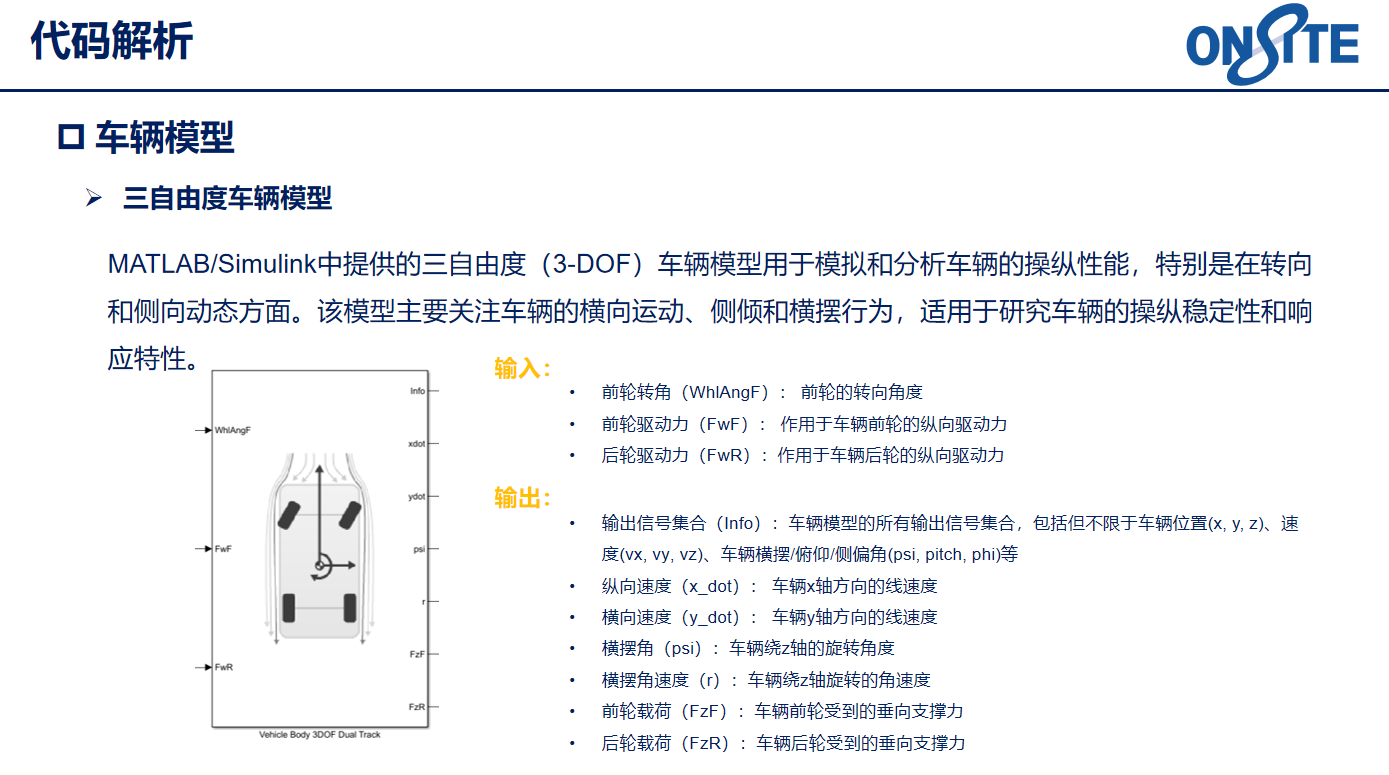
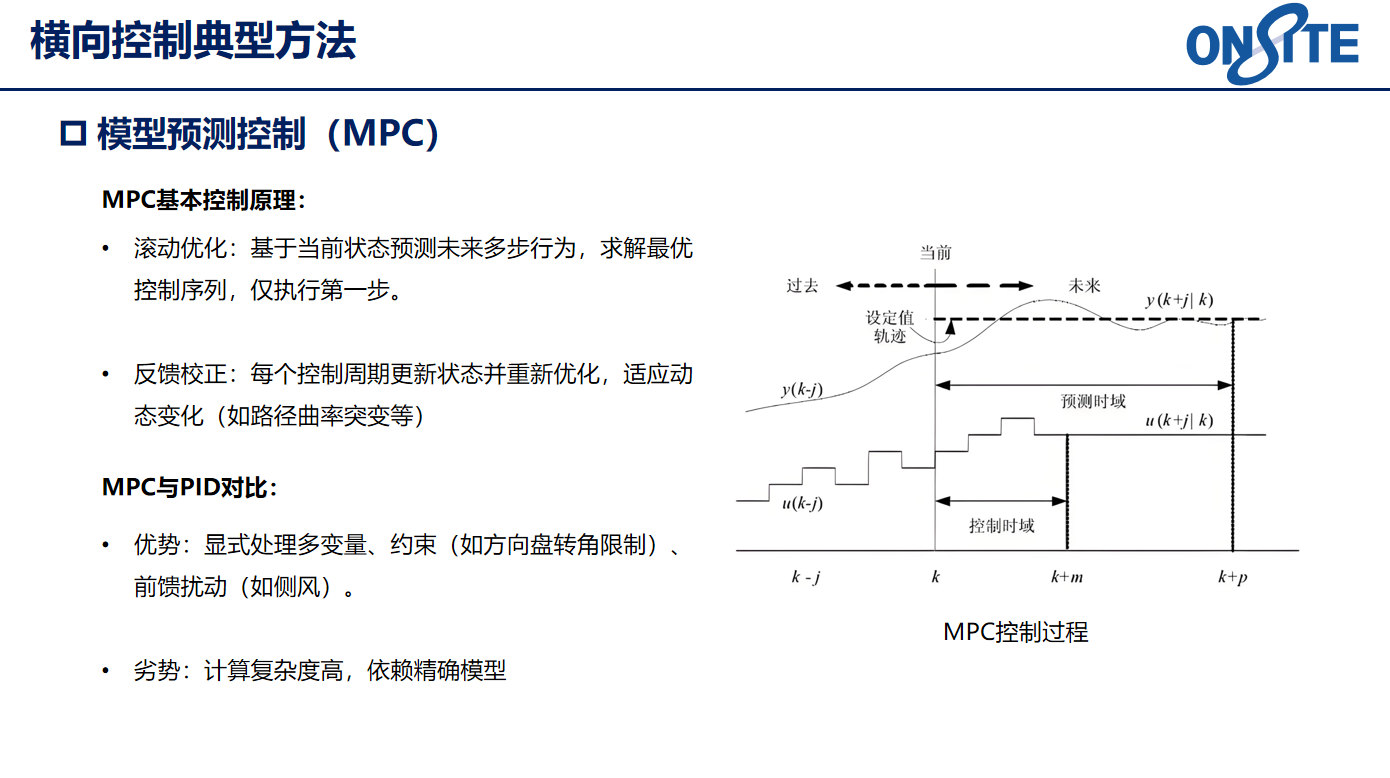
控制问题:横向控制典型方法与案例
第十四讲
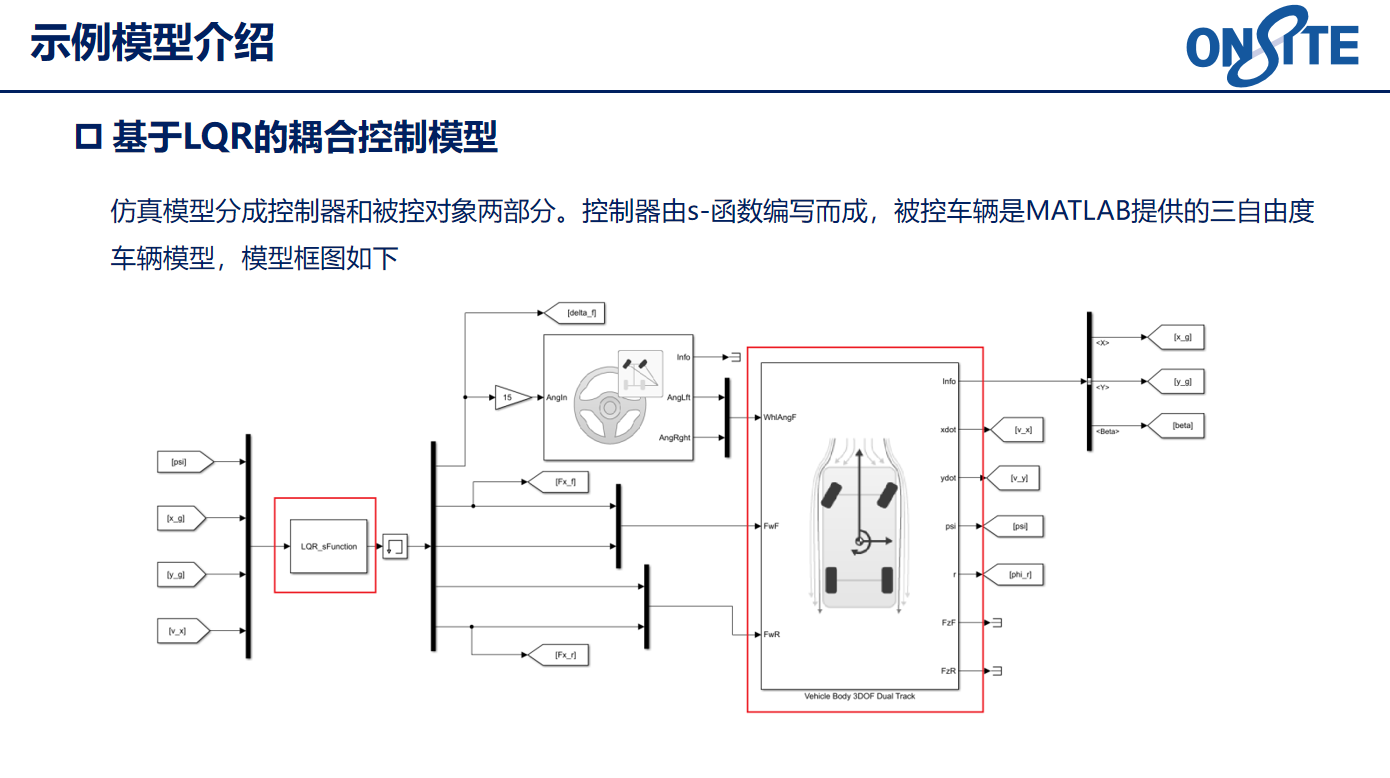
控制问题:耦合控制典型方法与案例
第十五讲
控制问题:数据驱动控制
第十六讲
自动驾驶前沿:端到端方案
第十七讲
自动驾驶前沿:LLM支持的自动驾驶
第十八讲
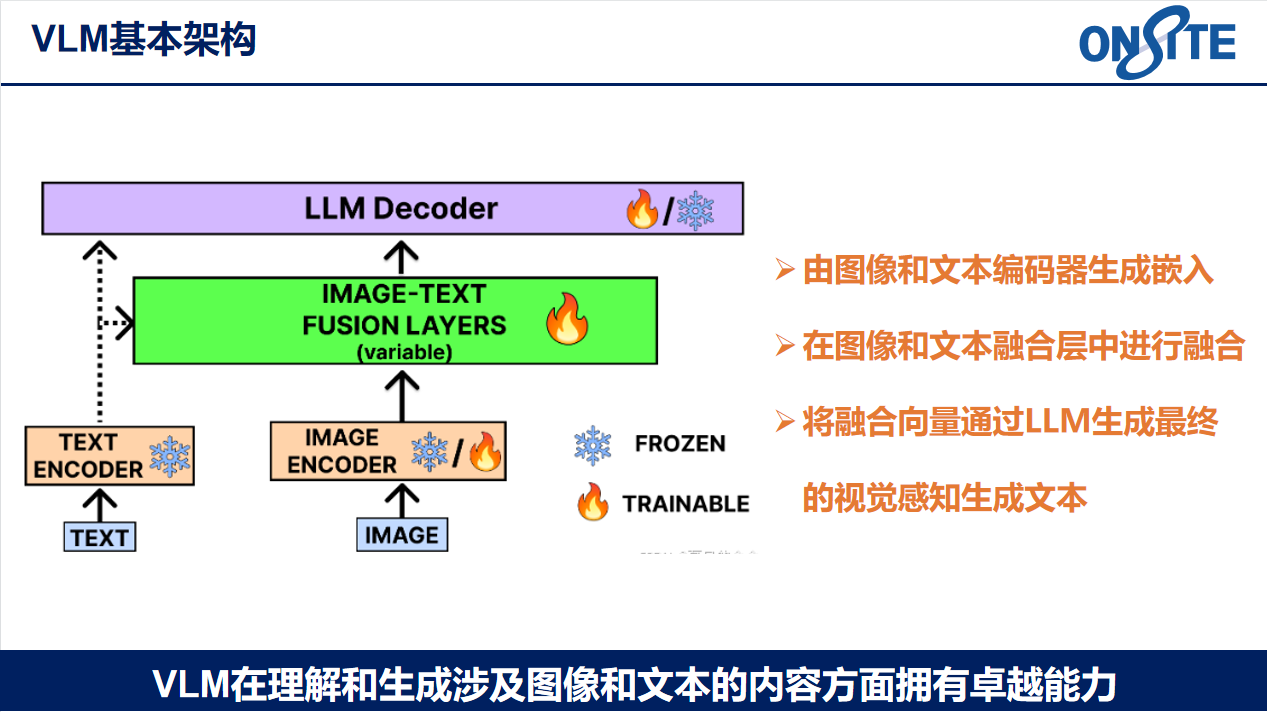
自动驾驶前沿:VLM&VLA

第十九讲
自动驾驶前沿:世界模型
如果您想获取OnSite学习中心丰富的教学资源库,或咨询资源使用方法、课程内容对接、个性化资源推荐等问题,欢迎随时通过以下渠道联系我们。我们的教学支持团队将为您提供详细指引,并协助解答关于资源获取、权限开通及特色教学项目的所有疑问,助力您高效开展教学活动。
资源获取表单链接:https://forms.gle/BML8RHRuwREXdZpa7
🚦 模块开发进度
👁 感知模块
– [√] 感知基础与目标识别
– [√] 语义分割
– [√] 深度估计
– [√] 2D目标检测
🔮 预测模块
– [√] 预测入门与单车轨迹预测
– [√] 多车轨迹预测
– [√] VRU 轨迹预测
🧠 决策规划模块
– [√] 单车决策
– [√] 协同决策
– [√] 运动规划
🎯 控制模块
– [√] 控制基础知识
– [√] 纵向控制 PID
– [√] 横向控制 MPC
– [√] 耦合控制 LQR
– [√] 数据驱动的控制
📃 测试
– [√] 测试理论
– [√] 测试方法
– [√] 测试实践
💻 前沿技术
– [√] 端到端自动驾驶
– [√] LLM支持的决策
– [√] 世界模型
– [√] VLM 和 VLA
