控制问题-纵向控制
此处提供了一个针对“控制问题-纵向控制任务”的Matlab上手示例,示例针对纵向车速,利用PID控制算法进行调控,最终采用纵向车速跟踪控制的误差作为指标进行结果评价。完整项目的下载链接为:https://github.com/TOPSlearningcenter/Longitudinal
以下给出了模型介绍、操作步骤与代码解读。
模型介绍
1. 模型概述:
比例积分微分控制(proportional-integral-derivative control),简称PID控制。PID控制简单实用,应用广泛,目前大部分在车上应用的控制算法中都是PID控制。PID控制参数数量少,在对模型了解不多的情况下,通过人工反复调试参数也能得到理想的控制效果。
纵向控制说明:车辆轨迹纵向控制希望控制的是纵向的位置,但实际控制过程中横总向的位置误差通常耦合在一起,单独控制纵向位置的意义不大,因此自动驾驶车辆的纵向控制任务主要指对纵向车速的控制。
2. 文件说明:
- reference.mat 为参考轨迹数据,包含时间戳 t_ref ,x坐标 x_ref ,y坐标 y_ref 三个变量。参考轨迹通常由上游决策规划模块生成。
- Sim_Demo.slx 为Simulink文件,用于图形化编程及仿真运行。主要包括整体控制框架和被控对象模型等。
- MPC_sFunction.m 控制器s函数文件,MPC控制算法代码编写在该文件中。
- evaluator.mlx 后处理部分代码在该文件中,包括轨迹、误差、车辆状态参数曲线的绘制,动画演示。
操作步骤
0. 准备工作:
- 本项目可运行在MATLAB R2022a及以上版本,需安装完整的Simulink工具箱。
- 下载项目并解压,将MATLAB的工作路径设置为该文件夹;
- 或将文件夹中的文件复制到当前文件夹下。
1. 运行文件:
- 双击 Sim_Demo.slx 文件,并等待启动Simulink。
- 点击 运行 按钮开始仿真。

- 运行结束后,后在工作目录下会生成 reference_processed.mat 和 Sim_result.mat 两个数据文件。reference_processed.mat 为仿真时控制器为减少重复计算,初始化计算产生的中间数据。Sim_result.mat 为仿真结果数据。
2. 后处理运行结果:
- 仿真结束后,需要对结果进行可视化绘图。双击 evaluator.mlx 。
- 在 实时编辑器 选项卡下,按顺序点击 运行节 ,查看每一节的运行结果。

代码解读
1. 仿真模型:
- 仿真模型主体包括两部分:①被控对象和②控制器。其中,控制器由s-函数编写而成,被控车辆是MATLAB提供的三自由度车辆模型,模型框图如下

- 被控是三自由度车辆设置参数为纵向力输入

- 纵向控制时不考虑横向,即车辆跟踪直线,车辆的前轮转角始终为0
3. PID算法:
PID控制算法原理就是对误差的反馈。误差及其积分和微分的运算作为输入给到被控系统,系统只要还有误差,则PID控制器就能计算输入来纠正误差,最终让误差消失,实现控制目目标。
为统一格式,PID控制算法也用s-函数进行编写,其主函数为
- 在本案例中定义速度误差为
![]()
- 将误差的比例,积分、微分加权后得到希望的输入加速度
- 在s-函数中,可以用离散状态计算上述积分和微分过程

其中,![]() 为采样时间,积分用累加表示如下
为采样时间,积分用累加表示如下

因为计算积分和微分需要用到上一时刻的变量,因此可以用到s-函数的mdlUpdate模块
3. 纵向力分配:
PID控制器得到的是纵向加速度,也可以认为是油门开度,或总的纵向力,对不同的被控车辆输入的信号需求可以是不同。对于本案例的被控对象,要求输入的是施加在四个车轮上的纵向力,为充分发挥路面的附着条件,对四个车轮上的纵向力按照垂向载荷进行简单分配。
总的纵向力为:
![]()
简单起见,可以根据静态载荷进行分配
因此前后轴的垂向力为:
前后轴的纵向力为:
将上述过程放在s函数的输出函数中得到
4. 结果评估与可视化:
- 纵向跟踪任务指标通常简化为速度跟踪,因此指标为纵向车速跟踪控制的误差,纵向平均车速控制误差可以定义为:
本案例中,纵向速度平均控制误差为![]() =0.0808 m/s。
=0.0808 m/s。
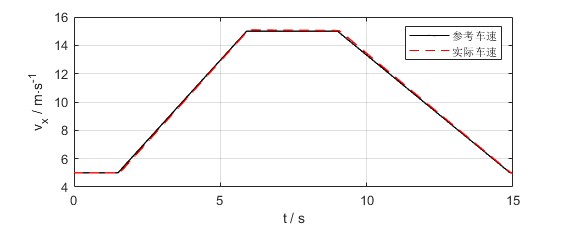
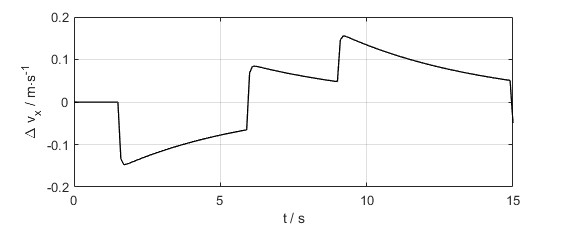
- 纵向速度跟踪曲线和误差曲线如下图
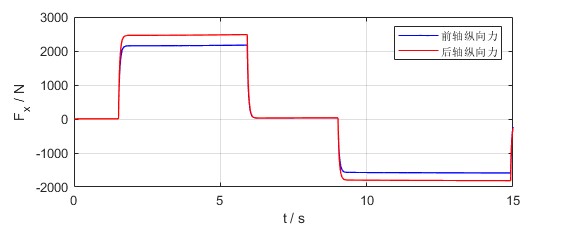
- 纵向力的输入曲线如下图
- 效果动画
